Mehrfarbenerkennung in Echtzeit mit Python-OpenCV
Damit ein Roboter neben der Objekterkennung die Umgebung visualisieren kann, ist auch die Erkennung seiner Farbe in Echtzeit sehr wichtig.
Warum ist das wichtig? : Einige reale Anwendungen
- Im selbstfahrenden Auto, um die Verkehrssignale zu erkennen.
- In einigen Industrierobotern wird die Mehrfarbenerkennung verwendet, um Pick-and-Place-Aufgaben beim Trennen verschiedenfarbiger Objekte auszuführen.
Dies ist eine Implementierung zum Erkennen mehrerer Farben (hier wurden nur rote , grüne und blaue Farben berücksichtigt) in Echtzeit mithilfe der Programmiersprache Python.
Verwendete Python-Bibliotheken:
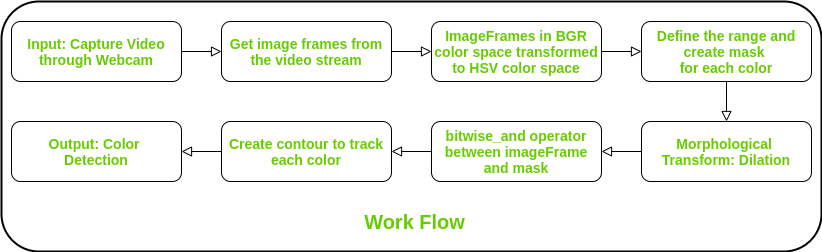
Beschreibung des Arbeitsablaufs:
-
Schritt 1: Eingabe: Video über die Webcam aufnehmen.
Schritt 2: Lesen Sie den Videostream in Bilderrahmen.
Schritt 3: Konvertieren Sie den imageFrame in BGR (RGB-Farbraum, dargestellt als drei Matrizen aus Rot, Grün und Blau mit ganzzahligen Werten von 0 bis 255) in den HSV-Farbraum (Farbton-Sättigungswert). Der Farbton beschreibt eine Farbe in Bezug auf die Sättigung , stellt die Menge an grauer Farbe in dieser Farbe dar und der Wert beschreibt die Helligkeit oder Intensität der Farbe. Dies kann als drei Matrizen im Bereich von 0-179, 0-255 bzw. 0-255 dargestellt werden.
Schritt 4: Definieren Sie den Bereich jeder Farbe und erstellen Sie die entsprechende Maske.
Schritt 5:Morphologische Transformation: Dilatation, um Rauschen aus den Bildern zu entfernen.
Schritt 6: bitweise_und zwischen dem Bildrahmen und der Maske wird ausgeführt, um diese bestimmte Farbe spezifisch zu erkennen und andere zu entfernen.
Schritt 7: Erstellen Sie eine Kontur für die einzelnen Farben, um den erkannten Farbbereich deutlich anzuzeigen.
Schritt 8: Ausgabe: Erkennung der Farben in Echtzeit.
Unten ist die Implementierung.
importnumpy as npimportcv2webcam=cv2.VideoCapture(0)while(1):_, imageFrame=webcam.read()hsvFrame=cv2.cvtColor(imageFrame, cv2.COLOR_BGR2HSV)red_lower=np.array([136,87,111], np.uint8)red_upper=np.array([180,255,255], np.uint8)red_mask=cv2.inRange(hsvFrame, red_lower, red_upper)green_lower=np.array([25,52,72], np.uint8)green_upper=np.array([102,255,255], np.uint8)green_mask=cv2.inRange(hsvFrame, green_lower, green_upper)blue_lower=np.array([94,80,2], np.uint8)blue_upper=np.array([120,255,255], np.uint8)blue_mask=cv2.inRange(hsvFrame, blue_lower, blue_upper)kernal=np.ones((5,5),"uint8")red_mask=cv2.dilate(red_mask, kernal)res_red=cv2.bitwise_and(imageFrame, imageFrame,mask=red_mask)green_mask=cv2.dilate(green_mask, kernal)res_green=cv2.bitwise_and(imageFrame, imageFrame,mask=green_mask)blue_mask=cv2.dilate(blue_mask, kernal)res_blue=cv2.bitwise_and(imageFrame, imageFrame,mask=blue_mask)contours, hierarchy=cv2.findContours(red_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(0,0,255),2)cv2.putText(imageFrame,"Red Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0,(0,0,255))contours, hierarchy=cv2.findContours(green_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(0,255,0),2)cv2.putText(imageFrame,"Green Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0, (0,255,0))contours, hierarchy=cv2.findContours(blue_mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)forpic, contourinenumerate(contours):area=cv2.contourArea(contour)if(area >300):x, y, w, h=cv2.boundingRect(contour)imageFrame=cv2.rectangle(imageFrame, (x, y),(x+w, y+h),(255,0,0),2)cv2.putText(imageFrame,"Blue Colour", (x, y),cv2.FONT_HERSHEY_SIMPLEX,1.0, (255,0,0))cv2.imshow("Multiple Color Detection in Real-TIme", imageFrame)ifcv2.waitKey(10) &0xFF==ord('q'):cap.release()cv2.destroyAllWindows()break
Ausgabe: